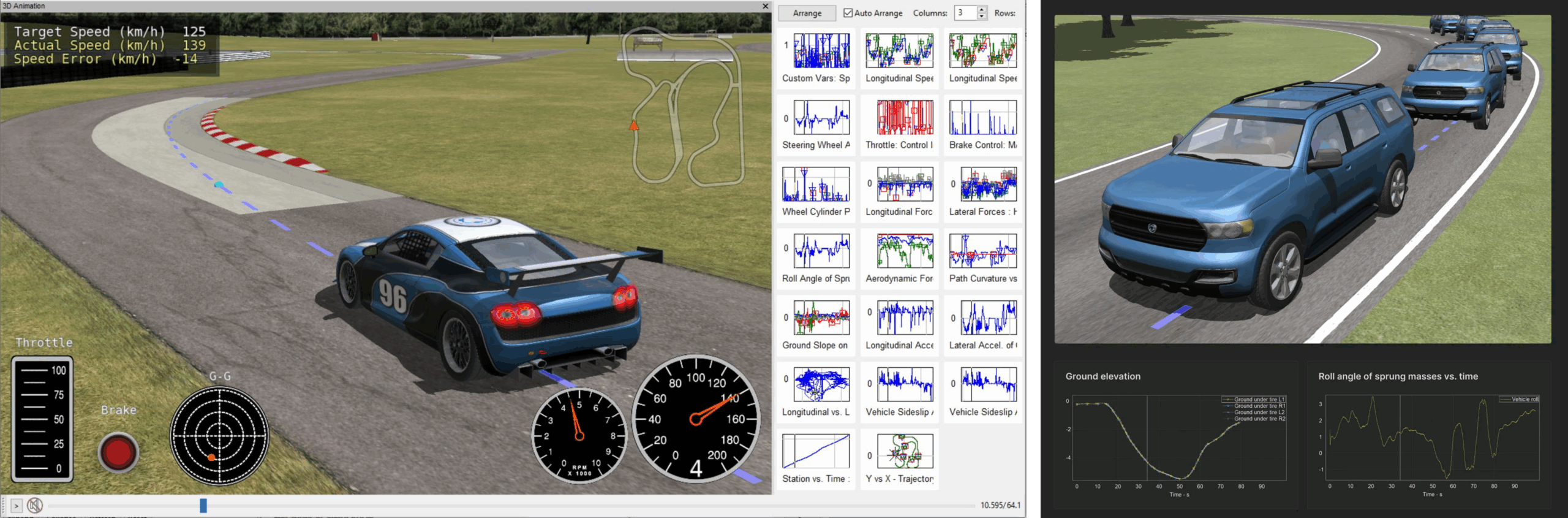
CarSim, MATLAB/Simulink, 그리고 기타 차량 동역학 해석 툴을 활용하여 가상 주행 시나리오를 구축하고, 해당 조건에서의 차량 응답 특성을 정밀하게 분석한다. 특히, 조향 입력에 따른 차량의 횡방향 안정성, 제동 시의 동적 하중 이동, 서스펜션 및 타이어 모델이 전체 주행 성능에 미치는 영향 등을 다각도로 검토한다.
또한 실제 도로 환경을 반영한 시뮬레이션 기반 시험을 통해 다양한 설계 변수(차량 중량, 휠베이스, 트랙폭, 현가장치 특성 등)의 민감도를 분석하고, 이를 통해 차량 성능 최적화와 안정성 향상을 위한 설계 가이드를 제시한다.
Research Task 2
시뮬레이션을 활용한 자율주행 시나리오 설계 및 검증
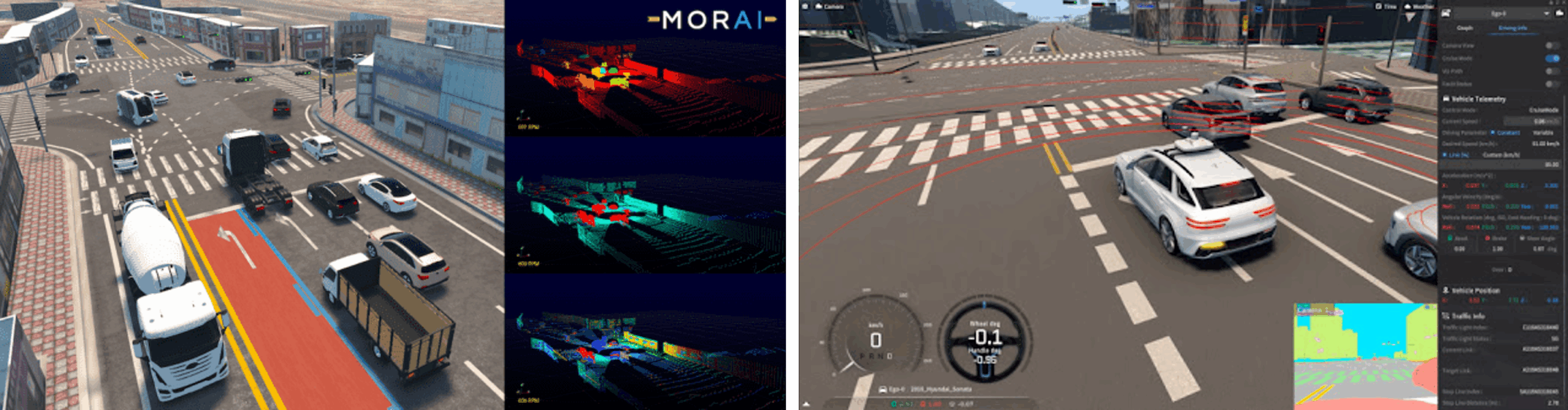
MORAI 시뮬레이터를 활용하여 자율주행 차량의 주행 안전성과 신뢰성을 검증하기 위한 시나리오를 설계하고 분석하는 것을 목적으로 한다.
대한민국 도로 체계에서 자주 발생하는 특수 교통 상황(비보호 좌회전, 갑작스러운 보행자 진입, 버스 전용차로 진입·이탈, 스쿨존 제한 속도 준수, 혼잡 교차로에서의 합류·분류 상황 등)을 시뮬레이터 상에서 정밀하게 구현한다. MORAI의 고정밀 지도와 교통 흐름 생성 기능을 활용하여 실제 도심 교차로, 국도, 고속도로 등의 다양한 주행 환경을 가상으로 재현하고, 각 상황에서 자율주행 시스템의 인지–판단–제어 알고리즘의 성능을 체계적으로 평가한다.
 Korean
Korean